
![]()
![]()
![]()
![]()
![]()
![]()
|
|
Inertia, or, Where to put the weight?(Part of this article was published in issue #172 of the American Model Yachting Association's "Model Yachting" quarterly magazine.)Previously, I asked about rudder throw and how to feed the rudder in during a tack or turn. The question here is how quickly or easily a boat turns, which is a discussion of whether to concentrate weight in the centre of the hull or distribute it towards the ends. This also leads into the question about a boat "hobby horsing", bobbing forward and backward in short waves or choppy water, which is a discussion of the pendulum effect of the ballast bulb on the fin. TurningSome boats are quicker to get turning than others, in the same way that some boats accelerate more quickly off the starting line. We know that the acceleration of a car or boat depends on its weight and the power available. A while back, I analyzed what might happen with an IOM if it was a little overweight, displacing 4.2 kg instead of 4.0. My conclusion was that the difference was negligible. But the situation is completely different when we look at the ability of a boat to turn. In engineering terms, turning is acceleration, a change in angular velocity, which is conceptually the same as the more familiar linear acceleration, a change in speed. This may seem a little strange, because in ordinary language we would not say that a boat accelerates when it turns, but that is indeed what it's doing.Mass moment of inertiaThe dynamics of rotational motion are very similar to those of linear motion, but instead of mass we have something called mass moment of inertia, or inertia for short. The willingness of a boat to turn, that is, change its direction in a rotational sense, depends upon its inertia. The mass moment of inertia, J, is a function of the mass of the body, m, and the square of the distance, r, of the centre of mass from the axis of rotation -- J = m . r^2.Let's imagine a pine broom handle, conveniently 200 cm long and 2 cm in diameter, weighing 214 g with mass moments of inertia of 7121 g.cm^2 in Y and Z, and 1 g.cm^2 in X, taken at the centre of mass. Let's take a cube of lead, 4.73 cm on the side, weighing 1000 g and bored through 2 cm, with a mass moment of inertia of 43 g.cm^2 in X and 40 g.cm^2 in Y and Z. Let's slide and fix the 1000 g lead cube to the stick centre. The combination would be easy to spin, and to stop spinning -- it has low inertia of 7161 g.cm^2 (made up of the 7121 for the stick plus the 40 for the lead). This arrangement is illustrated in Figure 1. 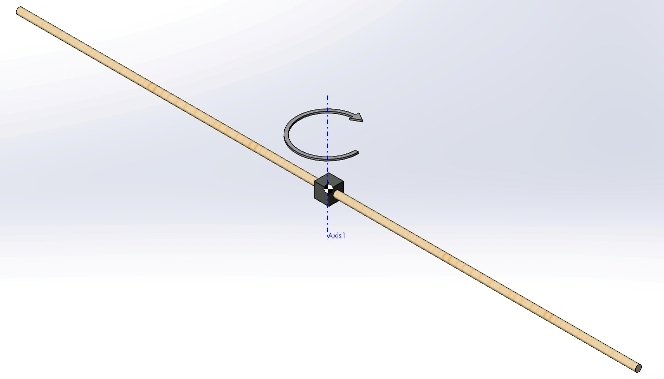 Figure 1. Inertia 7162 g.cm^2 Now move the lead out to the ends as a pair of 500 g cubes 3.86 cm on the side with a 2 cm bore (mass moment of inertia of 15 g.cm^2 in X and 14 g.cm^2 in Y and Z). The combination would take much more effort to spin, and to stop it spinning -- it has high inertia of 107149 g.cm^2 (made up of the 7121 for the stick and 30 for the two cubes, 15 each, but in addition the lead is now rotating 100 cm from the axis, adding 100000). This is illustrated in Figure 2. 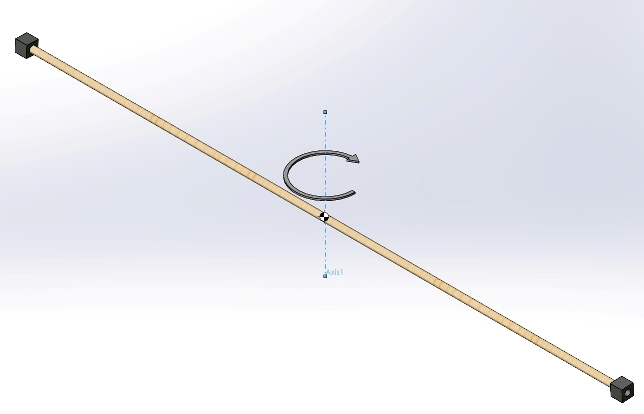 Figure 2. Inertia 107149 g.cm^2 (It may be worth saying that we are thinking of spinning the stick here by whirling it in a circle with its ends 100 cm from the rotational axis in either Y or Z. There is another way to spin the stick, rotating it around its length in X, and in this case it will have very low inertia of 44 g.cm^2 with the 1000 g cube or 31 g.cm^2 with the two 500 g cubes. This is illustrated in the following image.)  Figure 3. Inertia 44 g.cm^2 Yaw inertia -- tacking or turningTypically, the mass moment of inertia of a 4 kg IOM when yawing -- turning to port or starboard -- is something around 0.10 kg.m^2 (note that we've changed the units). Now what happens if the corrector weight is placed in the stern or bows instead of next to the fin box, and if the rudder servo and radio battery pack is placed well aft near the rudder stock?If we put our 0.3 kg corrector weight in the stern (or bows), 0.4 m from the centre of the boat, and position our servo and battery (also 0.3 kg) 0.4 m from the centre, the yaw inertia of the boat jumps from 0.10 to around 0.20. The boat will take twice as long to achieve its change of direction during a turn for a given rudder input. That is not wonderful news for speedy tacking or turning, but might be good news if you are concerned about sea-keeping and sustaining your turns in waves or wind. It should be clear that high yaw inertia boats are not suited to tacking duels, and an appropriate racing strategy would be to minimise tacks. Pitch inertia -- waves and chopBoat inertia is also a consideration when sailing in choppy water or short waves. The "hobby horse" effect of chop can, in extreme cases, stop the boat dead even in strong winds. Increasing inertia by relocating weights into the ends will have an effect on such bouncing. We must be very careful, however, to recognise we are now talking about pitch inertia, and the mass moment of pitch inertia is largely determined by the amount of lead ballast and the length of the keel fin.Very roughly, for an IOM with a 2.5 kg ballast bulb hung at an effective keel arm of .45 m, pitch inertia might be around 0.50 kg.m^2 (compared to 0.10 for yaw inertia). Then, putting the 0.3 kg corrector weight in the bows and the 0.3 kg rudder servo and battery pack in the stern increases pitch inertia to 0.60 kg.m^2, a relatively small increment. Would it be worth increasing pitch inertia for choppy waters? This would mean that the boat would be less prone to rise and fall as a wave passes; but it also means that, once set into a pitching motion, that motion would continue for longer (the boat has increased inertia, after all). Both of these effects mean that the boat would enter into the wave a little more rather than rise above it, and then be a little more "flat-footed" -- at the "wrong" angle of entry -- when the next wave approached. Drag would be higher, and it is not clear whether the more consistent sail drive would compensate. EC12 experimentsBob Wells has reported an experiment by Larry Robinson and Rod Carr who sailed an EC12 with higher inertia against an EC12 with lower inertia in choppy conditions. He tells us that it was the higher inertia boat which clearly suffered more.Long fin boatsLet's compare some numbers for modern Marbleheads with a 5 kg ballast bulb. One boat is fitted with a maximum 0.7 m fin, and the other boat is fitted with a 0.5 m fin. Pitch inertias are then around 3.02 and 1.72 kg.m^2 respectively (assuming B rig and radio gear placed around or near the fin box). That difference is considerable, and in a choppy pond might make the shorter fin preferable even at the expense of reduced righting moment. |
|
©2025 Lester Gilbert |